Lotka-Volterra
System type: Polynomial continuous system
State dimension: 2
Application domain: Biological systems
Model description
The 2-dimensional Lotka-Volterra system depicts the population change of a class of predators and a class of preys. The growth rate of the prey population $x$ over time is governed by the differential equation
\[ \dot{x} = α x - β x y,\]
where $α$, $β$ are constant parameters and $y$ is the population of predators. We can see that the number of prey grows exponentially without predation.
The population growth of predators is governed by the differential equation
\[ \dot{y} = δ x y - γ y,\]
where $γ, δ$ are constant parameters.
We set these parameters to $α = 1.5$, $β = 1$, $γ = 3$, and $δ = 1$.
using ReachabilityAnalysis
@taylorize function lotkavolterra!(du, u, p, t)
local α, β, γ, δ = 1.5, 1.0, 3.0, 1.0
x, y = u
xy = x * y
du[1] = α * x - β * xy
du[2] = δ * xy - γ * y
return du
endSpecification
We consider the initial set $x ∈ [4.8, 5.2], y ∈ [1.8, 2.2]$.
X0 = Hyperrectangle(; low=[4.8, 1.8], high=[5.2, 2.2])
prob = @ivp(x' = lotkavolterra!(x), dim:2, x(0) ∈ X0);Analysis
sol = solve(prob; T=8.0, alg=TMJets())
solz = overapproximate(sol, Zonotope);Results
using Plots
fig = plot(solz; vars=(1, 2), alpha=0.3, lw=0.0, xlab="x", ylab="y",
lab="Flowpipe", legend=:bottomright)
plot!(fig, X0; label="X(0)")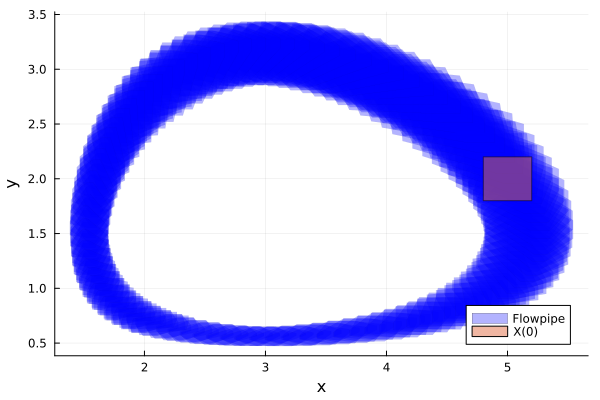
Adding parameter variation
In this setting, we consider all parameters as uncertain model constants. In addition, we add another term $ϵ$ to the first differential equation.
@taylorize function lotkavolterra_parametric!(du, u, p, t)
x, y, αp, βp, γp, δp, ϵp = u
xy = x * y
du[1] = αp * x - βp * xy - ϵp * x^2
du[2] = δp * xy - γp * y
# encode uncertain parameters
du[3] = zero(αp)
du[4] = zero(βp)
du[5] = zero(γp)
du[6] = zero(δp)
du[7] = zero(ϵp)
return du
endSpecification
p_int = Hyperrectangle(; low=[0.99, 0.99, 2.99, 0.99, 0.099], high=[1.01, 1.01, 3.01, 1.01, 0.101])
U0 = cartesian_product(Singleton([1.0, 1.0]), p_int)
prob = @ivp(u' = lotkavolterra_parametric!(u), dim:7, u(0) ∈ U0);Analysis
sol = solve(prob; tspan=(0.0, 10.0))
solz = overapproximate(sol, Zonotope);Results
fig = plot(solz; vars=(1, 2), lw=0.3, title="Uncertain parameters",
lab="abstol = 1e-15", xlab="x", ylab="y")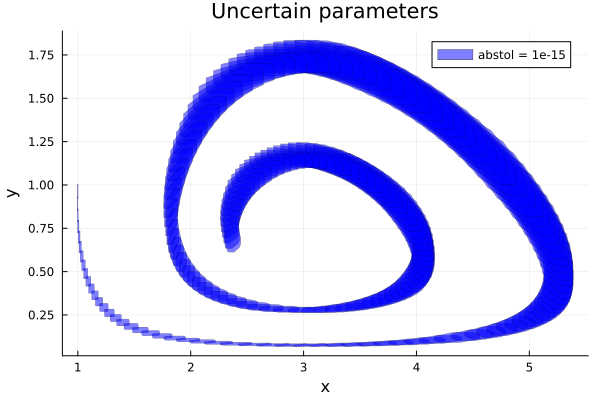
Uncertain initial condition (u0)
Now we consider an initial box around u0
$ϵ = 0.05$
In this setting, we consider the uncertain parameter $ϵ$ with radius $0.05$.
Specification
□(ϵ) = BallInf([1.0, 1.0], ϵ)
U0 = cartesian_product(□(0.05), convert(Hyperrectangle, p_int))
prob = @ivp(u' = lotkavolterra_parametric!(u), dim:7, u(0) ∈ U0);Analysis
sol = solve(prob; T=10.0, alg=TMJets(; abstol=1e-10))
solz = overapproximate(sol, Zonotope);Results
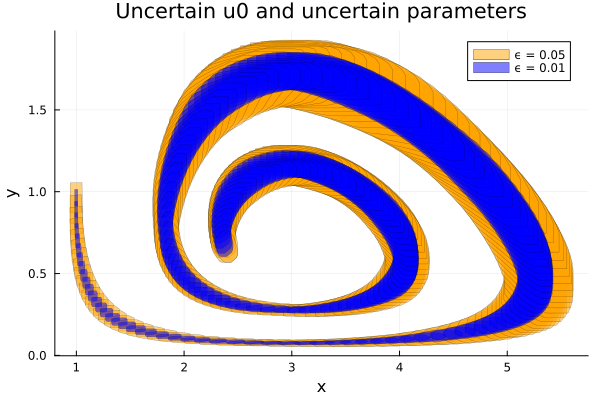
fig = plot(solz; vars=(1, 2), color=:orange, lw=0.3, lab="ϵ = 0.05",
title="Uncertain u0 and uncertain parameters", xlab="x", ylab="y")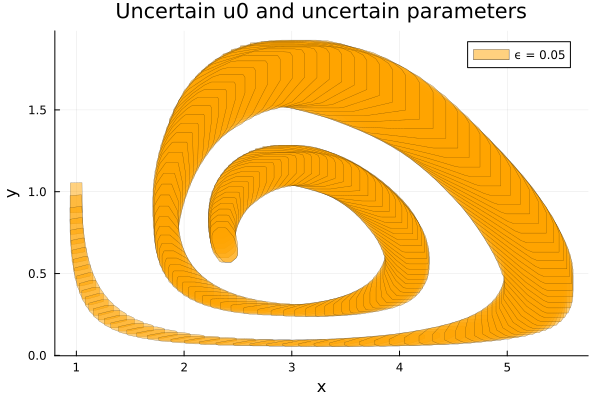
$ϵ = 0.01$
In this setting, we consider the uncertain parameter $ϵ$ with radius $0.01$.
Specification
U0 = cartesian_product(□(0.01), convert(Hyperrectangle, p_int))
prob = @ivp(u' = lotkavolterra_parametric!(u), dim:7, u(0) ∈ U0);Analysis
sol = solve(prob; T=10.0, alg=TMJets(; abstol=1e-10))
solz = overapproximate(sol, Zonotope);Results
plot!(solz; vars=(1, 2), color=:blue, lw=0.3, lab="ϵ = 0.01")