Attitude Control
The Attitude Control benchmark models a rigid-body system [PPR04].
using ClosedLoopReachability
import OrdinaryDiffEq, Plots, DisplayAs
using ReachabilityBase.CurrentPath: @current_path
using ReachabilityBase.Timing: print_timed
using Plots: plot, plot!Model
There are 6 state variables: $(ω_1, ω_2, ω_3, ψ_1, ψ_2, ψ_3)$. The system dynamics are given as follows:
\[\begin{aligned} \dot{ω}_1 &= 0.25 (u_0 + ω_2 ω_3) \\ \dot{ω}_2 &= 0.5 (u_1 - 3 ω_1 ω_3) \\ \dot{ω}_3 &= u_2 + 2 ω_1 ω_2) \\ \dot{ψ}_1 &= 0.5 (ω₂ (ξ - ψ₃) + ω₃ (ξ + ψ₂) + ω₁ (ξ + 1)) \\ \dot{ψ}_2 &= 0.5 (ω₁ (ξ + ψ₃) + ω₃ (ξ - ψ₁) + ω₂ (ξ + 1)) \\ \dot{ψ}_3 &= 0.5 (ω₁ (ξ - ψ₂) + ω₂ (ξ + ψ₁) + ω₃ (ξ + 1)) \end{aligned}\]
where $ω = (ω_1, ω_2, ω_3)$ is the angular velocity in a body-fixed frame, $ψ = (ψ_1, ψ_2, ψ_3)$ are the Rodrigues parameters, and $ξ = ψ₁^2 + ψ₂^2 + ψ₃^2$.
vars_idx = Dict(:states => 1:6, :controls => 7:9)
@taylorize function AttitudeControl!(dx, x, p, t)
ω₁, ω₂, ω₃, ψ₁, ψ₂, ψ₃, u₀, u₁, u₂ = x
ξ = ψ₁^2 + ψ₂^2 + ψ₃^2
dx[1] = 0.25 * (u₀ + ω₂ * ω₃)
dx[2] = 0.5 * (u₁ - 3 * ω₁ * ω₃)
dx[3] = u₂ + 2 * ω₁ * ω₂
dx[4] = 0.5 * ( ω₂ * (ξ - ψ₃)
+ ω₃ * (ξ + ψ₂)
+ ω₁ * (ξ + 1))
dx[5] = 0.5 * ( ω₁ * (ξ + ψ₃)
+ ω₃ * (ξ - ψ₁)
+ ω₂ * (ξ + 1))
dx[6] = 0.5 * ( ω₁ * (ξ - ψ₂)
+ ω₂ * (ξ + ψ₁)
+ ω₃ * (ξ + 1))
dx[7] = zero(u₀)
dx[8] = zero(u₁)
dx[9] = zero(u₂)
return dx
end;We are given a neural-network controller with 3 hidden layers of 64 neurons each and sigmoid activations. The controller has 6 inputs (the state variables) and 3 outputs ($u_0, u_1, u_2$).
path = @current_path("AttitudeControl", "AttitudeControl_controller.polar")
controller = read_POLAR(path);The control period is 0.1 time units.
period = 0.1;Specification
The uncertain initial condition is:
X₀ = Hyperrectangle(low=[-0.45, -0.55, 0.65, -0.75, 0.85, -0.65],
high=[-0.44, -0.54, 0.66, -0.74, 0.86, -0.64])
U₀ = ZeroSet(3);The control problem is:
ivp = @ivp(x' = AttitudeControl!(x), dim: 9, x(0) ∈ X₀ × U₀)
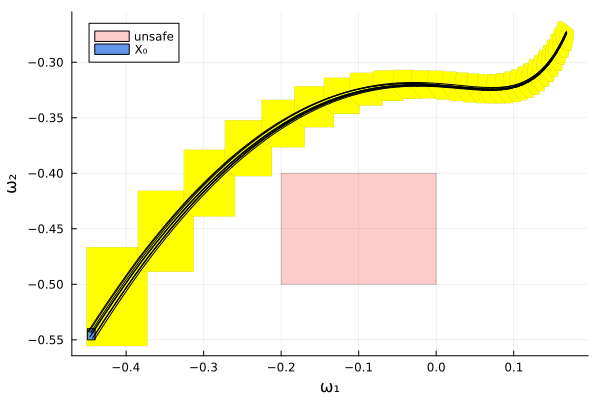
prob = ControlledPlant(ivp, controller, vars_idx, period);The safety specification is that a set of unsafe states should not be reached within 3 time units. A sufficient condition for guaranteed verification is to overapproximate the result with hyperrectangles.
unsafe_states = cartesian_product(
Hyperrectangle(low=[-0.2, -0.5, 0, -0.7, 0.7, -0.4],
high=[0, -0.4, 0.2, -0.6, 0.8, -0.2]),
Universe(3))
predicate(sol) = isdisjoint(overapproximate(sol, Hyperrectangle), unsafe_states);
T = 3.0
T_warmup = 2 * period; # shorter time horizon for warm-up runAnalysis
To enclose the continuous dynamics, we use a Taylor-model-based algorithm:
algorithm_plant = TMJets(abstol=1e-4, orderT=5, orderQ=1);To propagate sets through the neural network, we use the DeepZ algorithm:
algorithm_controller = DeepZ();The verification benchmark is given below:
function benchmark(; T=T, silent::Bool=false)
# Solve the controlled system:
silent || println("Flowpipe construction:")
res = @timed solve(prob; T=T, algorithm_controller=algorithm_controller,
algorithm_plant=algorithm_plant)
sol = res.value
silent || print_timed(res)
# Check the property:
silent || println("Property checking:")
res = @timed predicate(sol)
silent || print_timed(res)
if res.value
silent || println(" The property is satisfied.")
result = "verified"
else
silent || println(" The property may be violated.")
result = "not verified"
end
return sol, result
end;Run the verification benchmark and compute some simulations:
benchmark(T=T_warmup, silent=true) # warm-up
res = @timed benchmark(T=T) # benchmark
sol, result = res.value
@assert (result == "verified") "verification failed"
println("Total analysis time:")
print_timed(res)
println("Simulation:")
res = @timed simulate(prob; T=T, trajectories=10, include_vertices=false)
sim = res.value
print_timed(res);Flowpipe construction:
4.380995 seconds (3.54 M allocations: 306.448 MiB, 43.04% gc time)
Property checking:
0.063492 seconds (143.32 k allocations: 9.284 MiB)
The property is satisfied.
Total analysis time:
4.449602 seconds (3.68 M allocations: 316.484 MiB, 42.37% gc time, 0.00% compilation time)
Simulation:
0.877612 seconds (3.12 M allocations: 163.739 MiB, 0.00% compilation time)Results
Script to plot the results:
function plot_helper(vars)
fig = plot()
plot!(fig, project(unsafe_states, vars); color=:red, alpha=:0.2,
lab="unsafe", leg=:topleft)
plot!(fig, sol; vars=vars, color=:yellow, lw=0, alpha=1, lab="")
plot!(fig, project(X₀, vars); c=:cornflowerblue, alpha=1, lab="X₀")
plot_simulation!(fig, sim; vars=vars, color=:black, lab="")
return fig
end;Plot the results:
vars = (1, 2)
fig = plot_helper(vars)
plot!(fig; xlab="ω₁", ylab="ω₂")
# Plots.savefig(fig, "AttitudeControl.png") # command to save the plot to a file
fig = DisplayAs.Text(DisplayAs.PNG(fig))